

























Los retos tecnológicos cada día son más prometedores e impresionantes y los investigadores del Laboratorio de Ciencia Informática e Inteligencia Artificial del MIT (CSAIL, por sus siglas en inglés) no se quieren quedar atrás. Actualmente desarrollan un sistema que le permitan a los vehículos poder mapear el subsuelo, que consiste en un radar de penetración terrestre muy avanzado.
En un principio se quería recurrir a cámaras de vídeo y sistemas LiDAR, pero estos últimos son eficientes para mapear un entorno en 3D, pero la tecnología láser con la que cuenta, son incapaces de atravesar un manto de nieve. Por eso la solución está en utilizar un sistema GPR que pueda enviar los pulsos electromagnéticos, los cuales tienen una cobertura de tres metros de profundidad y detectan el asfalto, la composición del subsuelo, la presencia de raíces, entre otros elementos.
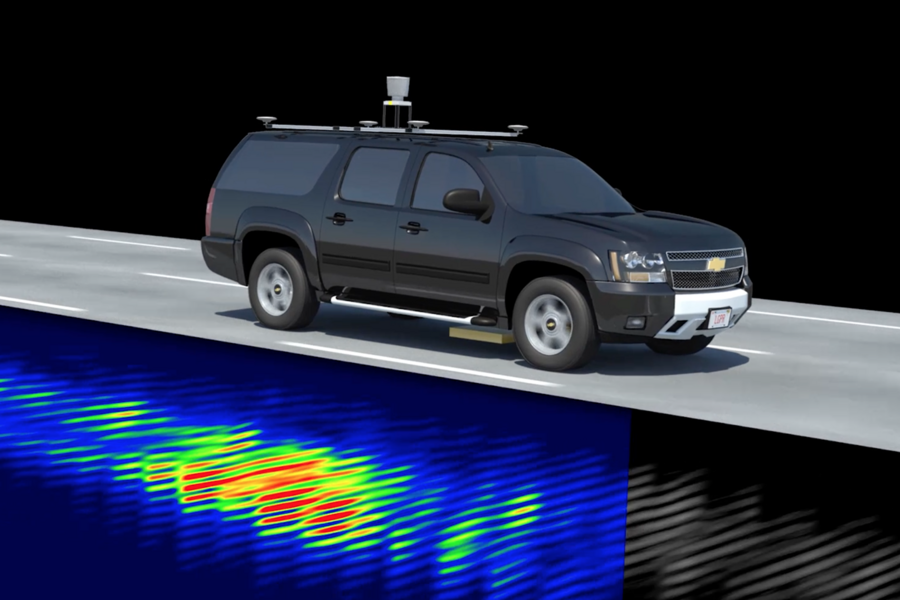
Los investigadores del CSAIL, están aprovechando estas características para poder integrar el sensor en un vehículo autónomo y poder realizar las pruebas correspondientes en un circuito cerrado cubierto de nieve. El LGPR que se ha empleado en las pruebas mide aproximadamente un metro y medio de ancho, este debe ser instalado en el exterior del vehículo para que funcione adecuadamente, aunque el proyecto aún sigue en pruebas, tiene que superar algunos obstáculos más para que sea lanzado en su totalidad, e incluso poder mejorar las capacidades actuales de los coches autónomos
Con respecto a los vehículos autónomos, el MIT ha utilizado un simulador de nombre VISTA, el cual sintetiza un número infinito de trayectorias que el vehículo podría seguir en el mundo real. Lo que se pretende aquí es poder hacer una recopilación de datos de video de conducción humana, estos fotogramas se traducirán en una nube 3D en la que se introduce el vehículo virtual. Cuando el vehículo realice un cambio de trayectoria, el motor será capaz de simular la modificación por medio del motor neuronal.













{kind=link}